
Simultaneous Localization and Mapping (SLAM)
SLAM is one of the most fundamental and classical topics in robotics. At FRPG, we study SLAM from the lens of combining perception with action -- which in literature is referred as 'active SLAM'. We focus on both novel methodological (algorithmic) and system-focused approaches for active SLAM
Active SLAM methods: In this context, we focus on how a robot can efficiently explore and map its environment while minimizing the control effort and the distance it travels to
do the task. We introduce a method that splits activeness over global and local scales. At global level, the method pre-computes optimal view points, which then locally gets refined for every
subsequent waypoint. We have also introduced novel utility functions that directly account for obstacles and path lengths
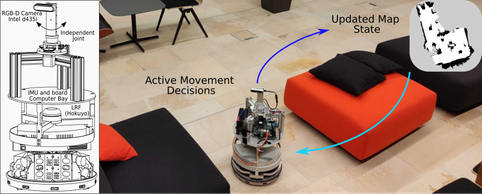
Novel robots for active SLAM: Here we approach active SLAM from a systems perspective. We have developed a robotic platform with an independently moving camera that allows our previously-developed active SLAM method to become generalizable for all kinds of robotic chasis (holonomic or not), and further reduce energy consumption. A combined state estimation method for the robot and the independently moving camera was developed within this solution.